PULP-Platform Simulation Verification
OpenHW’s starting point was the RI5CY (CV32E40P) and Ariane (CVA6) cores from PULP-Platform. The structure of the testbenches for these projects had a direct influence on the architecture of CORE-V-VERIF, so it’s help to review these. It is also informative to consider the Ibex project, another open-source RISC-V project derived from the ‘zero-riscy’ PULP-Platform core. The reader should keep in mind that this chapter was written in the early days of core-v-verif and will now be out of date in many places. Nevertheless, it is a useful historical document that captures the initial conditions of the project.
For those without the need or interest to delve into history of these projects, the Executive Summary below provides a (very) quick summary. Those wanting more background should read the RI5CY and Ariane sub-sections of this chapter which review the status of RI5CY and Ariane testbenches in sufficient detail to provide the necessary context for the CV32E4* Simulation Testbench and Environment and CVA6 Simulation Testbench and Environment chapters, which detail how the RI5CY and Ariane simulation environments will be migrated to CV32E and CVA6 simulation environments.
Executive Summary
In the case of the CV32E40P, we have an existing testbench developed for RI5CY. This testbench is useful, but insufficient to execute a complete, industrial grade pre-silicon verification and achieve the goal of ‘production ready’ RTL. Therefore, a two-pronged approach will be followed whereby the existing RI5CY testbench will be updated to create a CV32E40P “core” testbench. New testcases will be developed for this core testbench in parallel with the development of a single UVM environment capable of supporting the existing RI5CY testcases and fully verifying the CV32E4 cores. The UVM environment will be loosely based on the verification environment developed for the Ibex core and will also be able to run hand-coded code-segments (programs) such as those developed by the RISC-V Compliance Task Group.
In the case of CVA6, the existing verification environment developed for Ariane is not yet mature enough for OpenHW to use. The recommendation here is to build a UVM environment from scratch for the CVA6. This environment will re-use many of the components developed for the CV32E verification environments, and will have the same ability to run the RISC-V Compliance test-suite.
RI5CY
The following is a discussion of the verification environment, testbench and testcases developed for RI5CY.
RI5CY Testbench
The verification environment (testbench) for RI5CY is shown in Illustration 1. It is coded entirely in SystemVerilog. The core is instantiated in a wrapper that connects it to a memory model. A set of assertions embedded in the RTL [4] catch things like out-of-range vectors and unknown values on control data. The testbench memory model supports I and D address spaces plus a memory mapped address space for a set of virtual peripherals. The most useful of these is a virtual printer that provides something akin to a “hardware printf” capability such that when the core writes ASCII data to a specific memory location it is written to stdout. In this way, programs running on the core can write human readable messages to terminals and logfiles. Other virtual peripherals include external interrupt generators, a ‘perturbation’ capability that injects random (legal) cycle delays on the memory bus and test completion flags for the testbench.
RI5CY Testcases
Testcases are written as C and/or RISC-V assembly-language programs which are compiled/linked using a light SDK developed to support these test [5]. The SDK is often referred to as the “toolchain”. These testcases are all self-checking. That is, the pass/fail determination is made by the testcase itself as the testbench lacks any real intelligence to find errors. The goal of each testcase is to demonstrate correct functionality of a specific instruction in the ISA. There are no specific testcases targeting features of the core’s micro-architecture.
A typical testcase is written using a set of macros similar to TEST_IMM_OP [6] as shown below:
# instruction under test: addi
# result op1 op2
TEST_IMM_OP(addi, 0x0000000a, 0x00000003, 0x007);
This macro expands to:
li x1, 0x00000003; # x1 = 0x3
addi x14, x1, 0x007; # x14 = x1 + 0x7
li x29, 0x0000000a; # x29 = 0xA
bne x14, x29, fail; # if ([x14] != [x29]) fail
Note that the GPRs used by a given macro are fixed. That is, the TEST_IMM_OP macro will always use x1, x14 and x29 as destination registers.
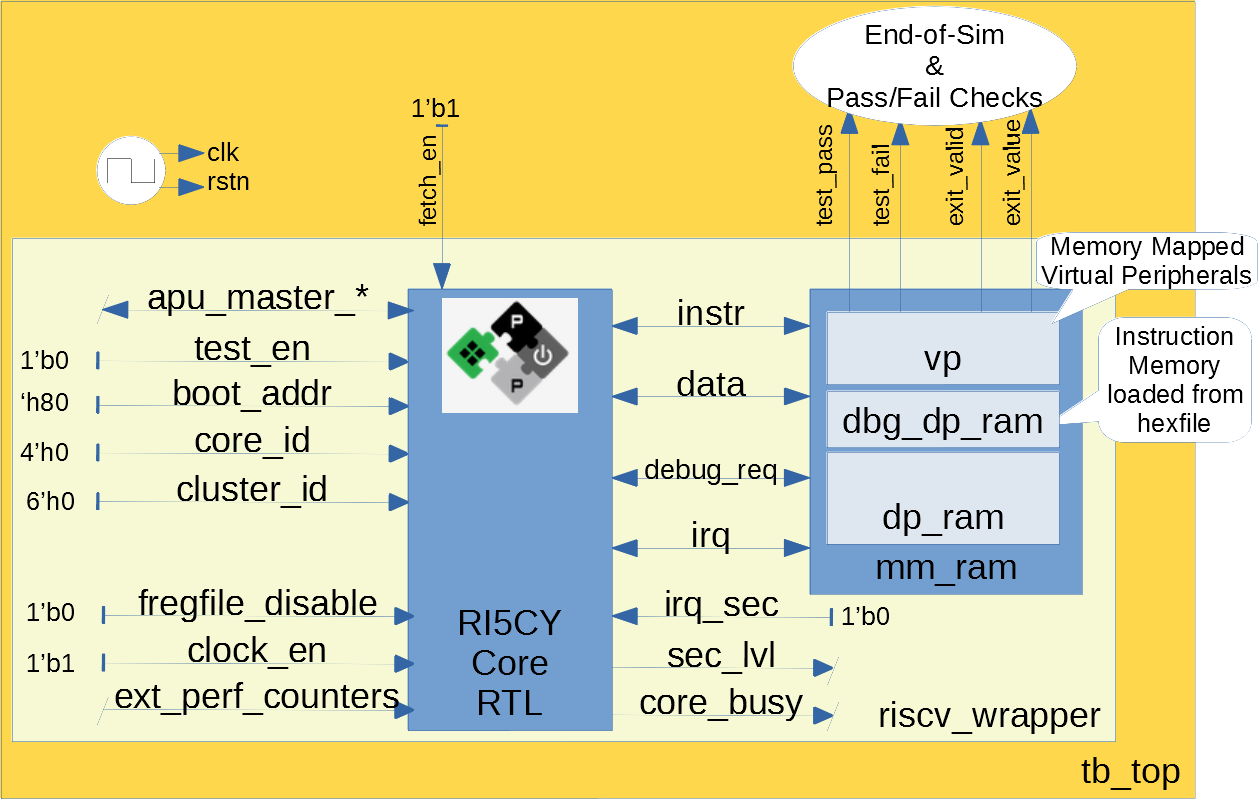
Illustration 1: RI5CY Testbench
The testcases are broadly divided into two categories, riscv_tests and riscv_compliance_tests. In the RI5CY repository these were located in the tb/core/riscv_tests and tb/core/ riscv_compliance_tests respectively. [7]
RISC-V Tests
This directory has sub-directories for many of the instruction types supported by RISC-V cores. According to the README, only those testcases for integer instructions, compressed instructions and multiple/divide instructions are in active development. It is not clear how much coverage the PULP defined ISA extensions have received.
Each of the sub-directories contains one or more assembly source programs to exercise a given instruction. For example the code segments above were drawn from the addi.S, a program that exercises the add immediate instruction. The testcase exercises the addi instruction with a set of 24 calls to TEST_* macros as shown above.
There are 217 such tests in the repository. Of these the integer, compressed and multiple/divide instructions total 65 unique tests.
RISC-V Compliance Tests
There are 56 assembly language tests in the** riscv_compliance_tests** directory. It appears that that these are a clone of a past version of the RISC-V compliance test-suite.
Firmware Tests
There are a small set of C programs in the firmware directory. The ability to compile small stand-alone programs in C and run them on a RTL model of the core is a valuable demonstration capability, and will be supported by the CORE-V verification environments. These tests will not be used for actual RTL verification as it is difficult to attribute specific goals such as feature, functional or code coverage to such tests.
Ariane
The verification environment for Ariane is shown in Illustration 2. It is coded entirely in SystemVerilog, using more modern syntax than the RI5CY environment. As such, it is not possible to use an open source SystemVerilog simulator such as Icarus Verilog or Verilator with this core.
The Ariane testbench is much more complex than the RI5CY testbench. It appears that the Ariane project targets an FPGA implementation with several open and closed source peripherals and the testbench supports a verification environment that can be used to exercise the FPGA implementation, including peripherals as well as the Ariane core itself.
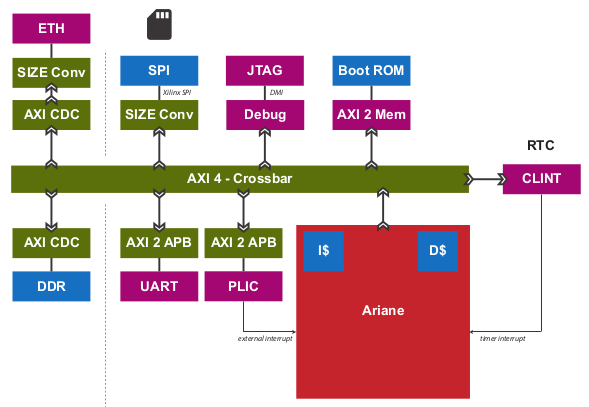
Illustration 2: Ariane Testbench
Ariane Testcases
A quick review of the Ariane development tree in GitHub shows that there are no testcases for the Ariane core. In response to a query to Davide Schiavone, the following information was provided by Florian Zaruba, the current maintainer of Ariane:
There are no specific testcases for Ariane. The Ariane environment runs cloned versions of the official RISC-V test-suite in simulation. In addition, Ariane boots Linux on FPGA prototype and also in a multi core configuration.
So, the (very) good news is that the Ariane core has been subjected to basic verification and extensive exercising in the FPGA prototype. The not-so-good news is that CVA6 lacks a good starting point for its verification efforts.
Comments and Recommendations for CVA6 Verification
Given that the focus of the Ariane verification environment is based on a specific FPGA implementation that the OpenHW Group is unlikely to use and the lack of a library of existing testcases, it is recommended that a new UVM-based verification environment be developed for CVA6. This would be a core-based verification environment as is envisioned for CV32E and not the mini-SoC environment currently used by Ariane.
At the time of this writing it is not known if the UVM environment envisioned for CV32E can be easily extended for CVA6, thereby allowing a single environment to support both, or completely independent environments for CV32E and CVA6 will be required.
IBEX
Note: the following was written in April of 2020 and is by now somewhat out of date. It is included here for its historical value for understanding the thinking behind the development of CORE-V-VERIF.
Strictly speaking, the Ibex is not a PULP-Platform project. According to the README.md at the Ibex GitHub page, this core was initially developed as part of the PULP platform under the name “Zero-riscy”, and was contributed to lowRISC who now maintains and develops it. As of this writing, Ibex is under active development, with on-going code cleanups, feature additions, and verification planned for the future. From a verification perspective, the Ibex core is the most mature of the three cores discussed in this section.
Ibex is not a member of the CORE-V family of cores, and as such the OpenHW Group is not planning to verify this core on its own. However, the Ibex verification environment is the most mature of the three cores discussed here and its structure and implementation is the closest to the UVM constrained-random, coverage driven environment envisioned for CV32E and CVA6.
The documentation associated with the Ibex core is the most mature of the three cores discussed and this is also true for the Ibex verification environment, so it need not be repeated here.
IBEX Impact on CV32E and CVA6 Verification
Illustration 3 is a schematic of the Ibex UVM verification environment. The flow of the Ibex environment is very close to what you’d expect to see in a UVM environment: constraints define the instructions in the generated program which is fed to both the device-under-test (Ibex core RTL model) and an ISS reference model. The resultant output of the RTL and ISS are compared to produce a pass/fail result. Functional coverage (not shown in the Illustration) is applied to measure whether or not the verification goals have been achieved.
As shown in the Illustration, the Ibex verification environment is a set of five distinct processes which are combined together by script-ware to produce the flow above:
An SV/UVM simulation of the Instruction Set Generator. This produces a RISC-V assembly program in source format. The program is produced according to a set of input constraints.
A compiler that translates the source into an ELF and then to a binary memory image that can be executed directly by the Core and/or ISS.
An ISS simulation.
A second SV/UVM simulation, this time of the core itself.
Once the ISS and RTL complete their simulations, a comparison script is run to check for differences.
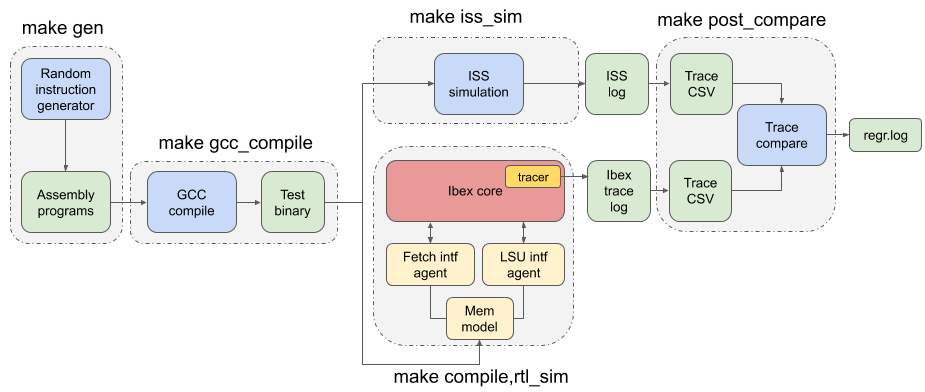
Illustration 3: Ibex Verification Environment
This is an excellent starting point for the CV32E verification environment and our first step shall be to clone the Ibex environment and get it running against the CV32E [9]. Immediately following, an effort will be undertaken to integrate the existing generator, compiler, ISS and RTL into a single UVM verification environment. It is known that the compiler and ISS are coded in C/C++ so these components will be integrated using the SystemVerilog DPI. A new scoreboarding component to compare results from the ISS and RTL models will be required. It is expected that the uvm_scoreboard base class from the UVM library will be sufficient to meet the requirements of the CV32E and CVA6 environments with little or no extension.
Refactoring the existing Ibex environment into a single UVM environment as above has many benefits:
Run-time efficiency. Testcases running in the existing Ibex environment must run to completion, regardless of the pass/fail outcome and regardless of when an error occurs. A typical simulation will terminate after only a few errors (maybe only one) because once the environment has detected a failure it does not need to keep running. This is particularly true for large regressions with lots of long tests and develop/debug cycles. In both cases simulation time is wasted on a simulation that has already failed.
Easier to debug failing simulations:
Informational and error messages can be added in-place and will react at the time an event or error occurs in the simulation.
Simulations can be configured to terminate immediately after an error.
Easier to maintain.
Integrated testcases with single-point-of-control for all aspects of the simulation.
Ability to add functional coverage to any point of the simulation, not just instruction generation.
Ability to add checks/scoreboarding to any point of the RTL, not just the trace output.
Comments and Recommendations for CV32E Verification
The RI5CY verification environment has several attractive attributes:
It exists and it runs. The value of a working environment is significant as they all require many person-months of effort to create.
It is simple and straightforward.
The ‘perturbation’ virtual peripheral is a clever idea that will significantly increase coverage and increase the probability of finding corner-case bugs.
Software developers that are familiar with RISC-V assembler and its associated tool-chain can develop testcases for it with little or no ramp-up time.
Any testcase developed for the RI5CY verification environment can run on real hardware with only minor modification (maybe none).
It runs with Verilator, an open-source SystemVerilog simulator. This is not a requirement for the OpenHW Group or its member companies, but it may be an attractive feature nonetheless.
Having said that the RI5CY verification environment has several shortcomings:
All of the intelligence is in the testcases. A consequence of this is that achieving full coverage of the core will require a significant amount of testcase writing.
All testcase are directed-tests. That is, they are the same every time they run. By definition only the stimulus we think about will be run and only the bugs we can imagine will be found. Experience shows that this is a high-risk approach to functional verification.
Testcases focuses on only ISA with no attention paid to micro-architecture features and non-core features such as interrupts and debug.
Stimulus generation and response checking is 100% manual.
The performance counters are not verified.
The FPU is not instantiated, so it is not clear if it was ever tested in the context of the core.
All testing is success-based – there are no tests for things such as illegal instructions or incorrectly formatted instructions.
There is no functional coverage model, and code coverage data has not been collected.
Some of the features of the testbench, such as the ‘perturbation’ virtual peripheral on the memory interface are not used by Verilator as the perturbation model uses SystemVerilog constructs that Verilator does not support.
Randomization of the ‘perturbation’ virtual peripheral on the memory interface is not controllable by a testcase.
So, much work remains to be done, and the effort to scale the existing RI5CY verification environment and testcases to ‘production ready’ CV32E RTL is not warranted given the shortcomings of the approach taken. It is therefore recommended to replace this verification environment with a UVM compliant environment with the following attributes:
Structure modelled after the verification environment used for the low-RISC Ibex core (see Section 3.4 in this document).
UVM environment class supporting the complete UVM run-flow and messaging service (logger).
Constrained-random stimulus of inst ructions using a UVM sequence-item generator. An example is the Google RISC-V instruction generator.
Prediction of execution results using a reference model built into the environment, not the individual testcases. Imperas has an open-source ISS that could be used for this component.
Scoreboarding to compare results from both the reference model and the RTL.
Functional coverage and code coverage to ensure complete verification of the core.
Its important to emphasize here that the the goal is to have a single verification environment capable of both compliance testing, using the model developed for the RI5CY verification environment, and constrained-random tests as per a typical UVM environment. Once this capability is in place, the existing RI5CY verification environment will be retired altogether.
Developing such a UVM environment is a significant task that can be expected to require up to six engineer-months of effort to complete. This need not be done by a single AC, so the calendar time to get a UVM environment up and running for the core will be in the order of two to three months. This document outlines a strategy for developing and deploying the UVM environment for CV32E in sub-section 4.
The rationale for undertaking such a task is twofold:
A full UVM environment is the shortest path to achieving the goals of the OpenHW Group. A UVM based constrained-stimulus, coverage driven environment is scale-able and will have measurable goals which can be easily tracked so that all member companies can see the effort’s status in real-time [8]. The overall effort will be reduced via testcase automation and the probability of finding corner-case bugs will be greatly enhanced.
The ability to run processor-driven, self-checking testcases written in assembly or C, maintains the ability to run the compliance test-suite. Also, this scheme is common practice within the RISC-V community and such support will be expected by many users of the verification environment, particularly software developers. Note that such tests can be difficult to debug if the self check indicates an error, but, for a more “mature” core design, such as the CV32E (RI5CY) and CVA6 (Ariane) they can provide a useful way to run ‘quick-and-dirty’ checks of specific core features.
Waiting for two to three months for RI5CY core verification to re-start is not practical given the OpenHW Group goals. Instead, a two-pronged approach which sees new testcases developed for the existing testbench in parallel with the development of the UVM environment is recommended. This is a good approach because it allows CORE-V verification to make early progress. When the CV32E UVM environment exceeds the capability of the RI5CY environment, the bulk of the verification effort will transition to the UVM environment. The RI5CY environment can be maintained as a tool for software developers to try things out, a tool for quick-and-easy bug reproduction and a platform for members of the open-source community restricted to the use of open-source tools.